乘用车自动驾驶解决方案和开发平台
乘用车是自动驾驶技术落实的 大、 广泛的载体之 ,乘用汽车底盘也更为智能,具备 定的线控能力,例如线控转向、线控灯光等,这简化了底层执行部件的线控化改装。基于乘用车的自动驾驶系统,是未来汽车行业的 大趋势。天隼依据其软件、硬件资源致力于提供 套完备的乘用车自动驾驶解决方案。
多驾多控
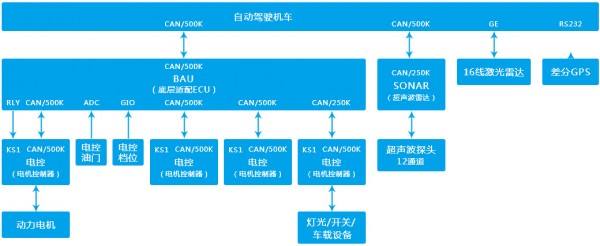
基于BAU和IOM构建的自动驾驶底层架构可以实现“人工驾驶”、“自动驾驶”以及“远程驾驶”等多种驾驶模式和控制方式。
技术方案的实施原则为:硬件系统 步到位;软件开发次序递进。
本节描述的技术方案及相应的技术参数仅供项目前期参考, 终项目验收的技术细则, 依照双方 终确认的技术方案及技术参数为依据,并进行验收流程和技术参数量化。
自动驾驶线控底盘:
1)线控转向系统
2)线控制动系统
3)线控动力系统
4)设备总线管理
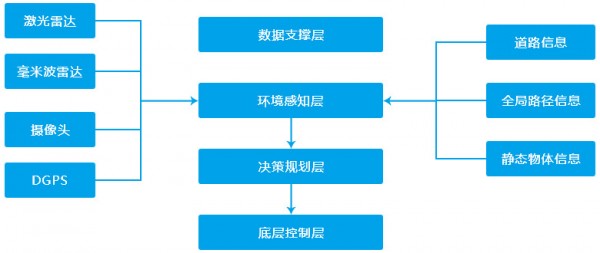
自动驾驶软件及算法:
1)基于激光雷达和差分GPS的SLAM算法
2)基于多传感器融合技术的自主循迹功能
3)基于多传感器融合技术的障碍物识别、避让功能
4)基于自动驾驶的专享手机约车服务
5)基于自动驾驶的公交车式服务
乘用车自动驾驶系统功能列表:
|
基础功能 |
功能描述 |
性能指标 |
|
交通信号灯识别 |
在十字路口能够准确地识别出交通信号灯的状态(红,黄, 绿);可区分交通信号灯的指示信息(左转、右转、直行); 该功能基于智能相机实现。 |
a)区分交通信号灯指示信息(左转、右转、直行); b)识别交通信号灯的状态(红,黄,绿); c)天气良好条件下识别率≥90% |
|
交通标志识别 |
检测并识别交通标识内容; 该功能基于智能相机和 V2X 传感器实现。 |
a)检测出交通标识并识别出交通标识内容,包含限速、禁止左转、禁止掉头等; b)视觉传感器识别率≥95% c)地面 V2X 传感器可靠性不予考虑 |
|
行人识别 |
检测道路环境中的行人并对其进行运动轨迹跟踪 该功能基于激光雷达和智能相机实现。 |
a)车前<50m,车后<10m,车侧<5m 的行人(1.8m*0.5m)进行探测; b)追踪行人并显示该行人与本车距离、相对速度、角度、角度变化率; c)行人探测率≥90% |
|
车辆识别 |
能够识别车辆并跟踪运动轨迹; 该功能基于毫米波雷达实现, 激光雷达辅助。 |
a)对车前<150m,车后<30m,车侧 <10m 的车辆(2.5m*2m)进行标识; b)追踪并显示目标车与本车的距离、相对速度、角度、角度变化率; c)车辆识别率≥90% |
|
其他目标检测 |
除人和车之外的其他障碍物检测; 该功能基于毫米波雷达和激光雷达实现。 |
a)对老年代步车车前<100m,车后 <30m,车侧<10m 的标识; b)对电动车、摩托车车前<60m, 车后<30m,车侧<10m 的标识; c)其他移动物体(<1m*1m)、车前 <30m,车后<30m,车侧<5m 的标识; 追踪并显示目标特征、目标角度、目标速度、目标距离; d)识别率≥95% |
|
循线行驶 |
车辆保持车道线内行驶,不越线行驶。在有限的道路空间中,本车能够很好的保持在同 个车道内行驶,不会对其他驾驶者造成不良影响。车道类型包括:直道、左弯道、右弯 道、S 弯道、发卡弯道等 |
a)与本车道左右车道线距离>10cm b)行驶轨迹平滑 c)行驶速度曲线平滑 |
|
自主启停 |
车辆可以在停止线或指定地点停止,并可以从停止点继续行驶 |
a )车辆停止后距停止线距离 <50cm; b)车辆停止在指定地点,与指定点纵向误差<50cm; c)车辆启动的执行时间≤3s |
|
自主巡航 |
同车道自主行驶,在前方有车且速度差异较小时,跟随前车行驶,并能够自主“停车/起步”。在没有前方车辆时,可以根据道路状况自主行驶 |
a) 大跟车距离 15m, 大碰撞时间 1.5s b)跟随前车的 大速度 30km/h |
|
自主避障 |
遇前方静态障碍物(如单锥筒、施工区域等),绕行障碍物; 遇前方慢行车辆,择机并线超车; 遇前方障碍物有碰撞风险(如横穿行人,并线车辆 等),减速或停车避让 |
a)绕行离障碍物横向距离≥50cm 且≤100cm; b)并线时本车与前车、后车距离≥ 10m,完成变道时间<5s; c)减速或停车避让, 大距离:10m, 大碰撞时间 1.0s |
|
自主并线 |
遵循规划路径,择机并线 |
本车与前车、后车距离≥10m,完成 变道时间<5s |
|
路口直行 |
进入路口前自主并线到直行车道,直行通过路口; 遇红灯或黄灯,在停止线自主启停;遇绿灯或无交通灯,自主巡航直行通过; 遇横穿行人,自主启停; |
a)路口减速时车速≤20km/h; b)车头与前车车尾距离<4m; c)离开路口进入车道内行驶,距离本车道两侧车道线≥20cm |
|
路口左转/ 右转 |
进入路口前自主并线到左转/ 右转车道,左转/右转通过路口; 遇交通灯指示禁止通过时,在停止线自主启停; 遇交通灯指示允许通过或无交通灯时,执行自主巡航+循线行驶左转/右转通过;遇横 穿行人,自主启停; |
a)路口减速时车速≤20km/h; b)与其他周边车辆距离>2m c)离开路口进入规定车道行驶,距两侧车道线≥20cm |
|
紧急制动 停车 |
在与任何障碍可能发生紧急 碰撞情况下,紧急制动停车 |
在本车道内完成,距离本车道两侧 车道线≥20cm |
|
路边停车 |
直行过程中靠路边停车 |
a)车辆与路交叉角<20°; b)车辆右侧与参考线距离<1m |